

 Suivi RSS
Suivi RSS Conception
Conception


 Version imprimable
Version imprimable

Installation du logiciel SAR pattern
|
 |
|
 |
|
 |
Aspects règlementaires de la création du circuit de recherche
- Choix du point de référence et du type de circuit de recherche

Ce choix incombe toujours au CROSS. La communication en phonie pourra être de mauvaise qualité et c’est pour cela que l’on parlera de « Victor Sierra » ou de « Sierra Sierra » puis la position du point de référence (datum) en degrés /minutes décimales. Le calcul de ce point de référence est détaillé dans le volume II du manuel IAMSAR, lecture très instructive s’il en est, et à la suite de laquelle je vous garanti que vous serez soulagé que l’on ne vous en confie pas la charge...
- Choix des paramètres du parcours
Là c’est un peu différent... Le CROSS interviendra pour vous préciser la couverture souhaitée de la zone de recherche et cela sera donc à vous (le navigateur) de définir les autres paramètres, en particulier la largeur de la bande de ratissage. La concertation avec le patron du canot qui connaît bien les limites de sa « machine » sera primordiale pour la précision du suivi de circuit. A ce propos regardons ce que dit le manuel :
On pourra consulter le texte de l’IAMSAR ici : [1]
- Pour la couverture de la zone, deux cas vont donc se présenter en fonction des circuits choisis :
- Choix du circuit VS (secteur) : C’est le cas le plus simple puisque l’étendue de couverture de la zone qui vous sera donné par le CROSS, est conditionnée par le paramètre (3) longueur de parcours qui en représente le rayon. Vous n’aurez donc qu’à définir l’orientation du circuit de la façon qui sera étudiée plus loin.
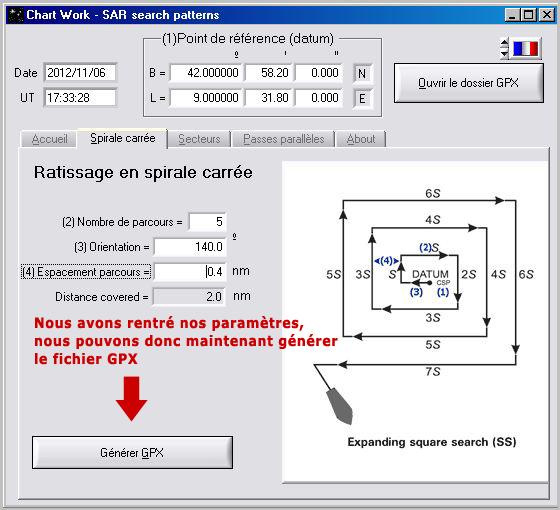
- Choix du circuit SS (spirale carrée) C’est le cas le plus compliqué car l’étendue de couverture de la zone est conditionnée ici par le paramètre (4) espacement du parcours ou largeur de la bande de ratissage. Heureusement une calculatrice est incorporée au logiciel et vous indique la zone couverte par vos choix. Commencer donc par rentrer le plus important qui est (4) espacement du parcours, et ensuite ajuster le paramètre (2) nombre de parcours, afin d’obtenir une couverture de zone satisfaisante.
En ce qui concerne la largeur des bandes de ratissage, voyons ce que dit le manuel :
On pourra consulter le texte de l’IAMSAR ici : [2]
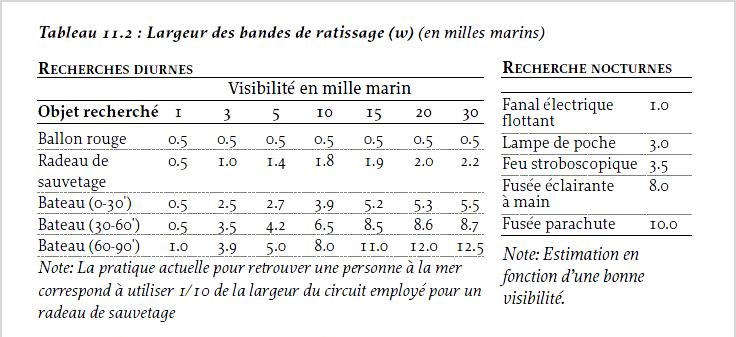
Voici un petit tableau fait par les canadiens et que je trouve assez bien fait, et qui sont les seuls à préconiser une largeur de bande de ratissage (W) de 0.10 M pour une recherche d’homme à la mer pour une visibilité de 3M et qui reste la visibilité maximum pour ce type de recherche à bord de nos canots.

- Orientation du circuit de recherche et notion de dérive totale
Dans la majorité des cas vous n’aurez pas à calculer l’orientation de votre circuit de recherche. Celle ci devra être idéalement la direction de le dérive totale et vous sera communiquée par le CROSS. Mais bien évidemment, une observation attentive des instruments, une connaissance des courants locaux, sont un plus certain, et de précieux renseignements à communiquer au CROSS pour affiner ses calculs.
On pourra consulter le texte de l’IAMSAR ici : [3]
Aspects pratique de la construction du circuit de recherche
![]()
Voilà enfin le moment de mettre en pratique ce logiciel et je vous promet de ne plus vous embêter avec le manuel IAMSAR... Ouf ! C’était à mon avis nécessaire pour vous expliquer encore une fois que la recherche et le sauvetage en mer sont une affaire sérieuse et qui ne s’accommode pas d’à peu près...
![]()
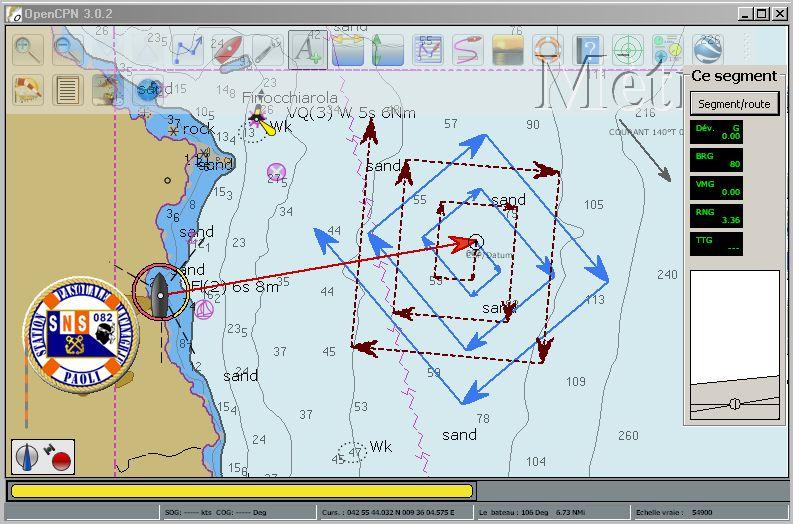
Construction du circuit en spirale carrée :
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
![]()
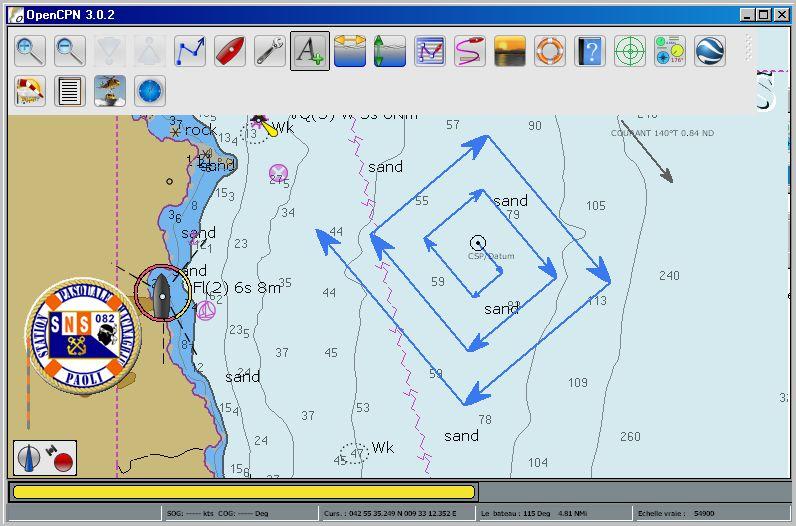
Voilà c’est terminé pour ce circuit, nous allons procéder maintenant, et à la même position, à la construction de notre VS.
| Circuit de recherche par secteurs (VS) La construction sera identique, à la différence que pour couvrir une zone de 2M, nous rentrerons une valeur de 1M comme (3) longueur de parcours (qui représente ici le rayon du cercle) , et notre orientation sera identique. Lorsque nous construirons le deuxième circuit nous augmenterons l’orientation de 30°T, et pour rallier notre point de départ nous ferons bien attention à ne pas rallier le centre mais bien notre waypoint identifié CSP et qui se trouve au début du premier segment orienté au 140°T. |
 |
Voilà, ce tutoriel est maintenant terminé. Je vous remercie pour votre lecture et je répondrais très volontiers à vos questions éventuelles sur ce site ou sur le site de notre station ou vous pourrez visionner un tutoriel animé et assister à la construction d’un circuit de recherche identique (1 passe) en moins de 45 secondes chrono et sans trucage...
Bien cordialement
Jean Paul, http://www.plaisance-pratique.com/_...
www.snsm-macinaggio.com




