

 Suivi RSS
Suivi RSS Conception
Conception


 Version imprimable
Version imprimable
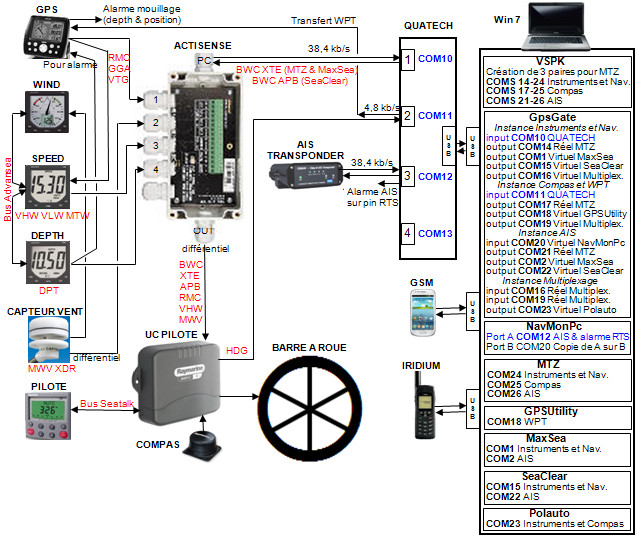
INSTRUMENTS RESEAU NMEA, LOGICIELS DE NAVIGATION, PORTS VIRTUELS SOUS PC WINDOWS
Cette installation n’a pas la prétention d’être universelle, elle correspond à mon cahier des charges initial :
- utilisation d’un PC sous Win 7 (plus un clone en secours)
- utilisation de plusieurs logiciels de navigation pour avoir accès à des cartographies différentes
- MaxSea Time Zero avec ses Raster et ses vectorielles Jeppesen et Navionics pour ma zone de navigation actuelle
- MaxSea 10 pour la vectorielle mondiale Jeppesen CM93-3
- SeaClear pour la possibilité de lire des cartes scannées
- lecture de tous les instruments et de l’AIS dans chacun de ces logiciels
- alarme AIS relayée sur sirène puissante avec NavMonPc
- infos vitesse fond et vent réel sur les instruments du cockpit
- transfert des routes du PC au GPS
- construction des polaires de vitesse en temps réel avec Polauto
- le pilote peut travailler en mode cap, track ou vent
![]()
 |
Configuration
- Win7 => Windows7 PRO SP1 64 bits
- Windows XP Mode et Windows Virtual PC => Maxsea
- VSPK => Fabulatek Serial Port Kit 5.4.3
- GpsGate => Franson GpsGate 2.6.0.402
- NavMonPC => 1.11
- MTZ => MaxSea Time Zero 2.0.1
- GPSUtility => 5.20
- MaxSea => 10.3.2.1
- SeaClear =>1.0.0.207
- Polauto => 7.1
- GPS => Garmin 152
- WIND-SPEED-DEPTH => Advensea S400
- CAPTEUR DE VENT =>LCJ CV7
- ACTISENSE => NDC-2
- QUATECH => QSU100
- TRANSPONDEUR AIS => COMAR CSB200
- UC PILOTE => RAYMARINE SMART PILOT X5
- AFFICHEUR DU PILOTE => ST 6002
![]()
Détails techniques :
- En phase de mise au point utiliser les logiciels d’ACTISENSE et de COMAR avec l’adaptateur 1RS232/USB plus un prolongateur à la place du boitier QUATECH
- On ne peut pas utiliser le GPS (152 ou 76) en mode navigation pour remplacer un PC hors service car le GPS envoie en permanence une phrase RMB vide, que sa navigation soit activée ou pas. Or le pilote ne fonctionne pas correctement en mode navigation à partir du PC s’il reçoit en même temps le RMB vide du GPS ; donc ne pas autoriser le passage du RMB GPS à travers ACTISENSE. De plus programmer le GPS 152 pour arrêter l’envoi de phrases inutiles (impossible sur GPS 76)
- La mise en réseau de WIND et SPEED permet à WIND de calculer et d’afficher le vent réel en vitesse et direction.
- La sortie de WIND n’est pas utilisable car pas de répétition possible du message CAPTEUR VENT entré, le vent réel calculé ne ressort pas non plus
- SPEED affiche également la vitesse fond grâce à l’entrée VTG venant du GPS (prioritaire par rapport à RMC qui contient aussi la vitesse fond)
- L’ajout de DEPTH sur le réseau permet un réglage commun de l’éclairage des 3 afficheurs. DEPTH, qui est alimenté à part de WIND et SPEED, doit être en route pour que le réseau fonctionne
- Les ports crées par GpsGate ne sont pas énumérés dans le gestionnaire de périphériques de Windows et ne sont pas visibles dans MTZ. Solution : créer pour MTZ 3 paires de ports avec VSPK
- L’info compas HDG sortant de l’UC PILOTE est décodée par MTZ mais pas par MaxSea qui n’interprète que HDM et HDT
- Pour MaxSea, mapper les ports COM dans Windows XP Mode : COM1 = COM1 et COM2 = COM2
- L’alarme AIS de NavMonPc via la pin RTS ne « passe pas » à travers GpsGate.
- Solution : entrer l’AIS directement dans NavMonPc et le dupliquer en sortie sur un port virtuel crée dans GpsGate
- Ne pas envoyer les informations Instruments à NavMonPc car cela déclenche une alarme permanente se répercutant sur RTS (les 2 phrases propriétaires du CAPTEUR VENT sans check sum ne sont pas en cause)




