

 Suivi RSS
Suivi RSS Conception
Conception


 Version imprimable
Version imprimable
Opencpn, sécurisation de l’approche : « Route et Trace »
Définir les conditions d’approche
|
 |
Définir une route de sécurité
|
 |
Contrôler la cohérence de la trace et de la route
|
 |
Contrôle de l’alignement
|
 |
Etablir une trace : mode opératoire
Variables d’éditions de la trace
|
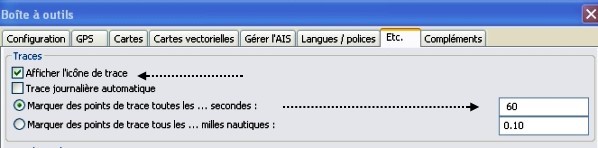 |
|
|
|
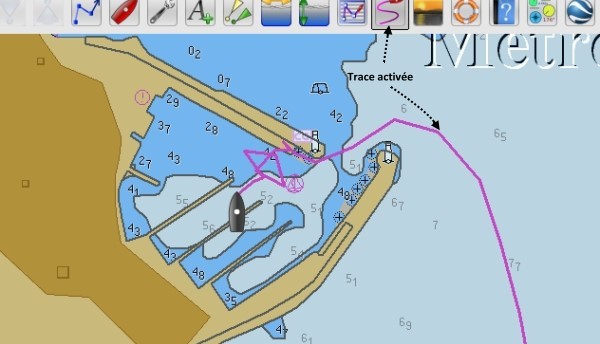 |
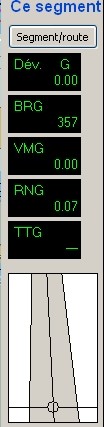
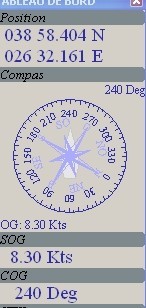
Contrôler une trace
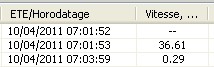
4 outils permettent de suivre et de contrôler la trace
|
 |
 |
 |
|
 |
- Très utile aussi, l’outil « mesurer » donnant caps et distances multiples. Voir : Créer-et-gerer-une-route

Annexe sur l’alarme de mouillage
- Démonstration du principe : le bateau est mouillé dans une crique étroite, fond de 10m, 60 m de chaîne, cercle de sécurité à 50m
| Le bateau est la limite de l’alerte | Le bateau est à l’intérieur de la zone d’alarme | Alarme : le bateau est sorti de la zone |
 |
 |
 |
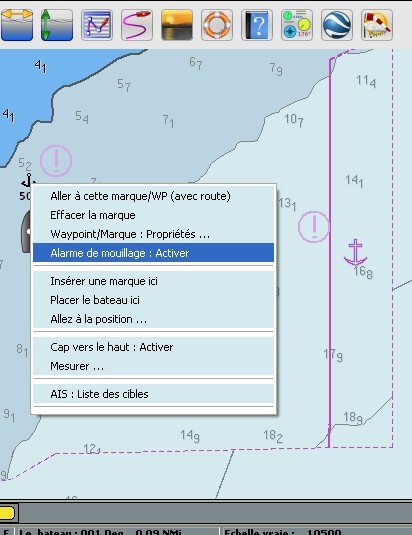
- Alarme de mouillage, mode opératoire
| Cliquer sur « Insérer une marque ici » | Clic droit sur la marque, puis « Propriété » | Inscrire la distance du cercle de sécurité dans la fenêtre « Nom de la marque »Changer la description, une ancre c’est mieux, Valider |
 |
 |
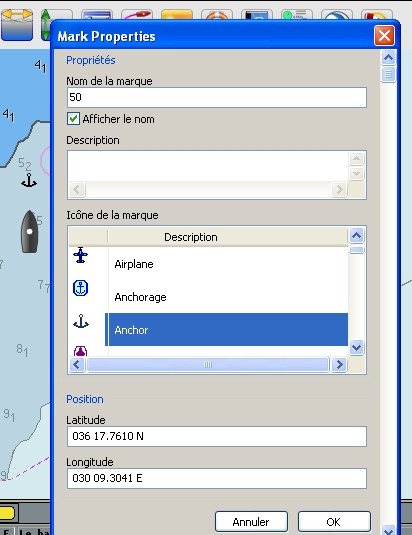 |
| Clic droit sur la marque, puis clic gauche sur « Alarme se mouillage : Activer » | Le cercle de sécurité est activé à 50m Le bateau est à l’intérieur pas d’alarme | Le bateau sort de la zone de sécurité des 50m ALARME |
 |
 |
 |
![]()
- Alarme de mouillage, gestion de l’alarme sonore
|
 |
Annexe sur la commande MOB
Ndlr : nous avons toujours trouvé les alarmes MOB d’Opencpn, pas très bien faites. Celle-ci privilégie un retour sue l’homme à la mer en utilisant les ressources du cadran d’activation des routes. Il semble que ce serait mieux, si dans ce cas, une trace soit automatiquement activée, si elle ne l’était pas.
|
|
|
 |
|
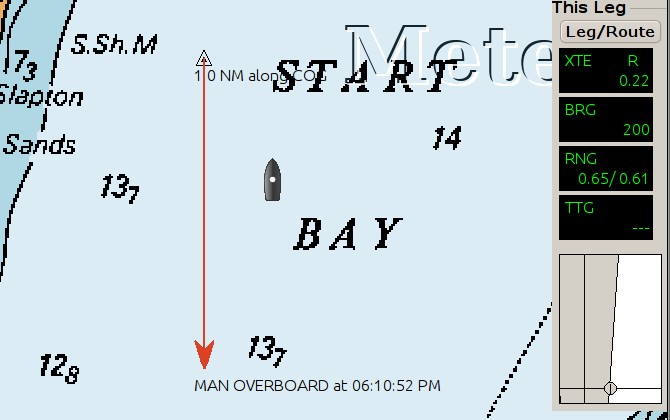 |
Ndlr : difficile de donner un conseil. Ne pas oublier, que le vent et le courant peuvent avoir déplacé l’homme à la mer, et qu’il faudra probablement quadriller la zone. Le suivi du quadrillage par une trace devrait améliorer la vision de l’état des recherches…
![]()
![]()


