

 Suivi RSS
Suivi RSS Conception
Conception


 Version imprimable
Version imprimable
Opencpn, sécurisation de l’approche : « Route et Trace »
Définir les conditions d’approche
|
 |
Définir une route de sécurité
|
 |
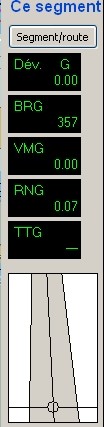
Contrôler la cohérence de la trace et de la route
|
 |
Contrôle de l’alignement
|
 |
Etablir une trace : mode opératoire
Variables d’éditions de la trace
|
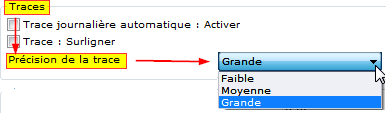 |
|
|
|
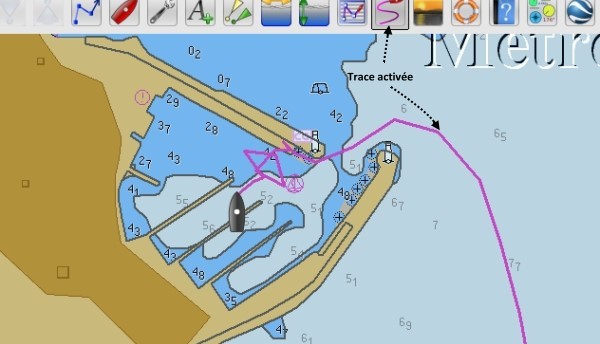 |
Contrôler une trace
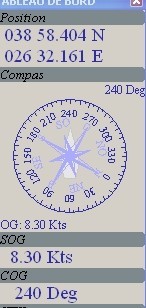
4 outils permettent de suivre et de contrôler la trace
|
 |
 |
 |
|
 |
|
 |
Menu propriété d’une trace
|
 |
| Ndlr : en complément sur la vitesse instantanée, au moment de l’enregistrement, le GPS peut avoir changé de faisceau, et si cela se produit quand une déferlante pousse au cul… On peut obtenir des résultats flatteurs, voir ci contre 36,61 nœuds, le 10/04/2011 à 07:01:53 … non, non pas çà… sauf à vouloir claironner sur les pontons : J’y étais, la preuve c’est enregistré… Même en A 40 ce ne serait pas raisonnable. |
 |
![]()
![]()


