Suivi RSS
Suivi RSS Conception
Conception


 Version imprimable
Version imprimable
Bonjour,
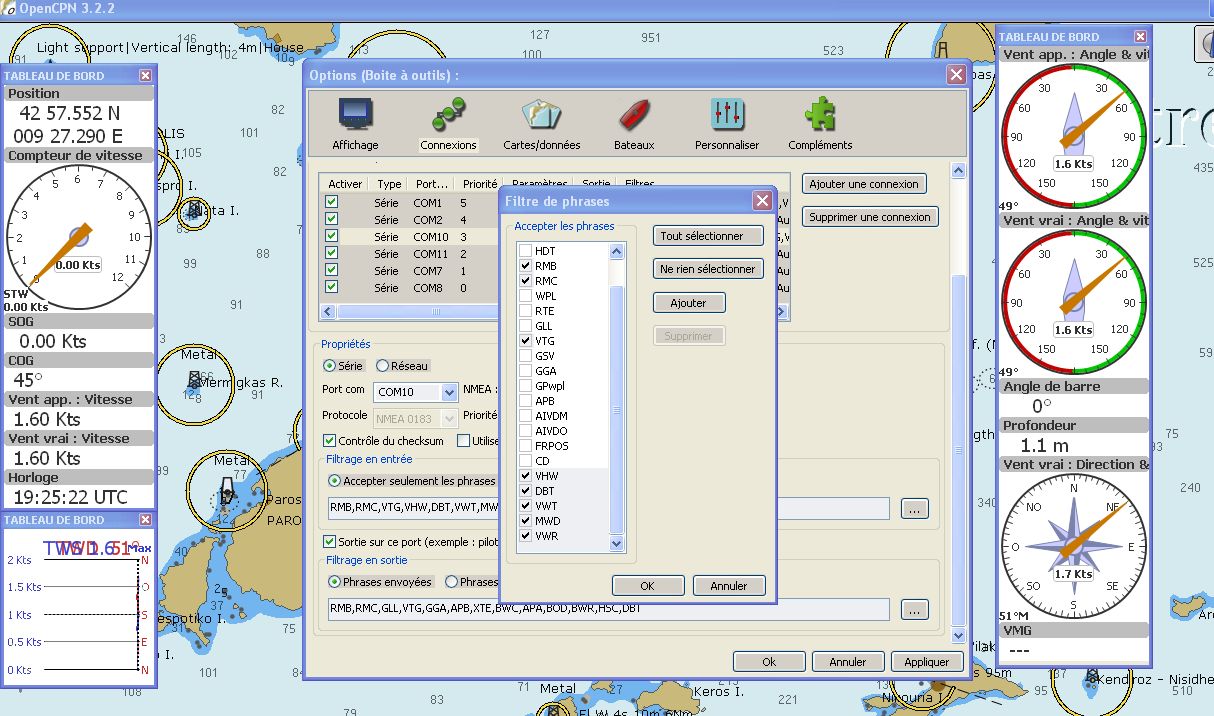
Je pensais le problème résolu mais non, c’est a dire que Opencpn se déconnecte très et trop souvent du Gps, (W7 et Furuno GP-32), les bonnes bonnes cases sont cochées.
Avec l’ancienne version 3.0.2 que j’ai réinstallé pas de problème.
Que faire SVP.
D’avance merci.
Pierre Sur Anak.