

 Suivi RSS
Suivi RSS Conception
Conception


 Version imprimable
Version imprimable Publié Juin 2011, (màj Juin 2011) par :
Publié Juin 2011, (màj Juin 2011) par :



Pilote automatique.
Pourquoi cet article ?
D’une part les automatismes ont étés mon métier et d’autre part au cours des nombreux discussions sur les forums, j’ai relevé beaucoup de remarques parfois contradictoires, lesquelles laissent un flou sur cette technologie aux multiples facettes.
Ce document est une réflexion sur le fonctionnement et le comportement du voilier sous pilote automatique. Il s’agit d’une analyse de la physique du voilier (simplifiée) et du servomécanisme attenant. Je n’ai pu éviter d’utiliser les équations différentielles et le calcul symbolique, ce qui fait qu’un pan de ce document n’est accessible qu’aux automaticiens. J’ai cherché, dans la mesure du possible à expliquer au mieux les phénomènes pour que chacun puisse en tirer un bénéfice. Ceux qui seront intéressés par l’aspect automatisme ou qui souhaitent approfondir leurs connaissances pourront consulter le cours de JM Dutertre sur http://www.esme.fr que je trouve bien fait.
J’ai explicité davantage la mise en équation qui est toujours le parent pauvre des explications. Alors que l’observation et l’analyse du phénomène physique sont les points les plus importants. Pour le reste, c’est de la cuisine de spécialiste.
![]() La première partie concerne la mise en équation.
La première partie concerne la mise en équation.
Elle est agrémentée d’explications multiples pour être appréciée par tous. Mis à part le coté physique et mathématique j’ai essayé de mettre en évidence certaines comparaisons dans le domaine nautique. J’espère que chacun pourra au mieux comprendre les réactions du bateau et l’influence de certaines conceptions vis-à-vis du comportement général.
Ne serait-ce que d’éviter, lors d’une belle manœuvre d’accostage qui ne pouvait qu’être réussie, de faire « pan » dans le cat-way comme cela m’est arrivé l’an dernier.
![]() La seconde partie concerne la stabilité.
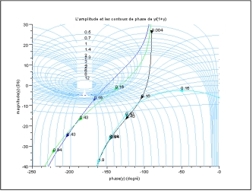
La seconde partie concerne la stabilité.
Elle s’adresse aux automaticiens. On y retrouve les concepts d’étude des servomécanismes avec les analyses de stabilité dans le plan de Black. J’y ait introduit l’inévitable contre réaction tachymétrique : le Gyro. Mais j’ai surtout poussé l’analyse sur la non linéarité induite par la limitation de vitesse du vérin du servomécanisme. Les petits pilotes d’entrée de gamme ne sont pas adaptés aux mers courtes ou aux bateaux volages. Ce qui ne les empêche pas d’être utiles par beau temps.
![]() La troisième partie concerne la simulation.
La troisième partie concerne la simulation.
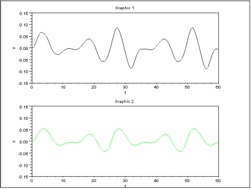 On compare les performances pratiques des réglages de l’étude théorique (vue sur un concept linéaire). Les comparaisons technologiques dénotent des améliorations que l’on peut obtenir. Et la conclusion reste la même : le plus important est le bon dimensionnement mécanique. L’électronique et ses réglages étant un moyen et non une finalité.
On compare les performances pratiques des réglages de l’étude théorique (vue sur un concept linéaire). Les comparaisons technologiques dénotent des améliorations que l’on peut obtenir. Et la conclusion reste la même : le plus important est le bon dimensionnement mécanique. L’électronique et ses réglages étant un moyen et non une finalité.
Bonne lecture et bon vent à ceux qui voudront approfondir :

- L’article entier en format PdF (1.5 Mo)
