Suivi RSS
Suivi RSS Conception
Conception


 Version imprimable
Version imprimable Publié Avril 2019, (màj Avril 2019) par :
Publié Avril 2019, (màj Avril 2019) par :

Introduction
Je partage mes informations pour aider ceux qui souhaiteraient fabriquer eux même ce système, j’espère aussi pouvoir ainsi comparer les résultats, et à terme voir ce qui pourrait être amélioré.
Les compétences requises sont à la portée de tout bricoleur en électronique (lire un schéma, soudures simples...), il faut toutefois noter que la programmation du composant programmable (PIC, qui n’est plus disponible préprogrammé), demande l’installation d’un outil et des logiciels associés, et donc un minimum de connaissances sur leur utilisation (ce que j’ai appris facilement grâce aux tutoriels en ligne voir ci-dessous). A noter aussi que la plupart des informations nécessaires sont uniquement disponibles en anglais.
Enfin, il est très important d’insister sur la présence de pics de tension de plusieurs centaines de volt pour alimenter le transducteur : un tel système mal réalisé ou mal mis en œuvre pourrait être potentiellement très dangereux pour des bricoleurs qui n’auraient pas les compétences pour une fabrication et une mise en œuvre sécurisée (tant pour la protection des personnes que pour les autres équipements électroniques à proximité).
Revue synthétique des systèmes existant :
Des systèmes d’antifouling à ultrasons sont proposés en vente depuis longtemps, mais l’aspect commercial et le manque de documentation ne permettent pas de considérer les résultats annoncés comme objectivement fiables.
Sur les forums nautiques où le sujet est abordé, les retours d’utilisateurs de ces systèmes commerciaux sont très variables : certains sont très satisfaits et d’autres dubitatifs, mais le manque de critères objectifs ne permet pas de conclure, surtout que l’efficacité semble dépendre très fortement du type de coques, et du soin apporté à l’installation, et d’autant plus que certains systèmes sont vendus en kit à installer soi même, et que certains intervenants n’ont pas forcément les compétences techniques nécessaires pour une mise en œuvre correcte.
- Cependant, quelques retours d’expérience beaucoup plus documentés et sérieux ont été récemment publiés en ligne, en particulier les deux articles de Eric Bretscher en 2018 : Ultrasonic antifouling system
- Enfin, après une petite bibliographie, la lecture d’une publication scientifique sérieuse associée à la Brunel University en 2016, a finit de me convaincre de l’intérêt potentiel de ces systèmes : ijetmr.com
Ayant la possibilité de fabriquer un de ces systèmes à bas coût, j’ai donc décider de profiter d’un tour de l’atlantique nord pour tester ce système en conditions réelles sur mon voilier aluminium de 9m.
Choix du système :

Lors de mes recherches sur les systèmes existant, j’ai constaté que certains systèmes commerciaux reprennent le même schéma de base que celui publié dans les revues Silicon Chip en sept 2010
- Siliconchip (dont s’inspire aussi E. Bretscher)
- Everyday Pratical Electronic en sept 2012 (voir extrait montrant la carte électronique en photo)
De plus toutes les informations nécessaires à la fabrication sont détaillées dans EPE sept 2012, et il est aussi possible d’acheter un kit avec le circuit imprimé et tous les composants fournis, à un prix beaucoup plus abordable que les autres systèmes disponibles à la vente.
Ayant quelques connaissances en électronique et souhaitant pouvoir éventuellement faire évoluer mon système, j’ai choisi de n’acheter que deux circuits imprimés et le magazine EPE de sept 2012 (le deuxième article d’EPE oct 2012 ne traite que de l’installation et n’est pas indispensable, d’autant plus que le collage avec une colle « souple » ne semble pas très adapté), et j’ai acheté les composants sur des sites de vente en ligne classique :
Achats :
- - Revue EPE sept 2012 et 2 circuits imprimés : 31€ (circuits 2x9.14 + revue 5.5 + frais de port 4.8 = 28.6£)
PS : pour des raisons de copyright, dans le doute je ne publierai pas d’extraits de cette revue. Tous les schémas, liste de composants, et informations nécessaires, sont par ailleurs accessibles en ligne, mais je recommande d’acheter la revue (l’autre revue Silicon Chip ne semblait plus disponible, de toute façon il me semble que l’article est parfaitement équivalent puisque rédigé par les mêmes auteurs L. Simson et J. Clarke). Je peux éventuellement fournir en message privé les fichiers pour réaliser les circuits imprimés, si ceux ci ne sont toujours plus disponibles comme c’était le cas lors de ma dernière commande. - - Principaux composants : (prix et références données à titre d’exemple, des équivalents sont facilement disponibles ailleurs mais sans doute à prix plus élevé)
- Transducteur 40kHz : 22€ Ultrasonic-Piezoelectric-transducer
- 5 x transformateurs précablés : 24€ transformer-customized. En fait 1 seul nécessaire, mais ce modèle vendu par 5 évite de devoir bobiner soit même, si autre référence il faudra bien vérifier que le bobinage correspond au schéma de EPE ).
- Programmeur PIC et adaptateur : 14€ Adapter-Universal-Programmer
- L’ensemble des autres composants dont la liste est donnée dans EPE se trouve probablement facilement dans n’importe quel magasin d’électronique pour moins de 20€ en prenant tout en double par sécurité.
Soit un coût total de l’ordre de 110€ (avec au moins 1 de chaque composant en rechange, sauf le transducteur et le programmeur PIC)
Réalisation et vérifications :
Je ne détaille pas la fabrication de la carte électronique, qui consiste uniquement à souder les composants sur le circuit imprimé en suivant les schémas très bien expliqués dans EPE, plus un peu de câblage et la réalisation d’une boite de protection (ou boite disponible pour quelques € sur aliexpress, personnellement j’ai utilisé des chutes de plaques en epoxy épaisseur 2mm, prévoir aussi un interrupteur déporté si l’emplacement est peu accessible). Pour des raisons de sécurité déjà évoquées, la réalisation doit être particulièrement soignée et il convient d’être très prudent lors des tests (présence de hautes tensions), mais ceci ne prend pas plus de 2h pour une personne sachant souder des composants simples.
Le plus délicat est la programmation du PIC (enfin pour ceux qui comme moi ne connaissent pas bien), mais on trouve facilement les ressources en lignes pour apprendre, par exemple Voir youtube . J’ai essayé de programmer ma propre version du microprogramme (afin de pouvoir essayer d’optimiser les plages de fréquences), mais n’ayant pas eu le temps de finir avant la transat, j’ai finalement opté pour la version fournie sur le site EPE
Lors des premiers tests j’ai eu un problème car le fusible 3A grillait systématiquement dès la mise sous tension. J’ai réglé ce problème en passant à un fusible retardé 4A, et en ajoutant une inductance (petite ferrite avec 30 tours de fil cuivre, en série sur le fil d’alim +12V juste après le connecteur), afin de limiter l’appel de courant. Par contre lorsque j’éteins le système, il y a encore un pic de tension qui se propage sur le circuit 12V du voilier et perturbe certains équipements sensibles (par exemple cela fait rebooter mon raspberry). Ceci devrait pouvoir se régler avec des filtres (condensateurs et ferrites), mais comme j’éteins rarement mon système, cela ne me gène pas ainsi.
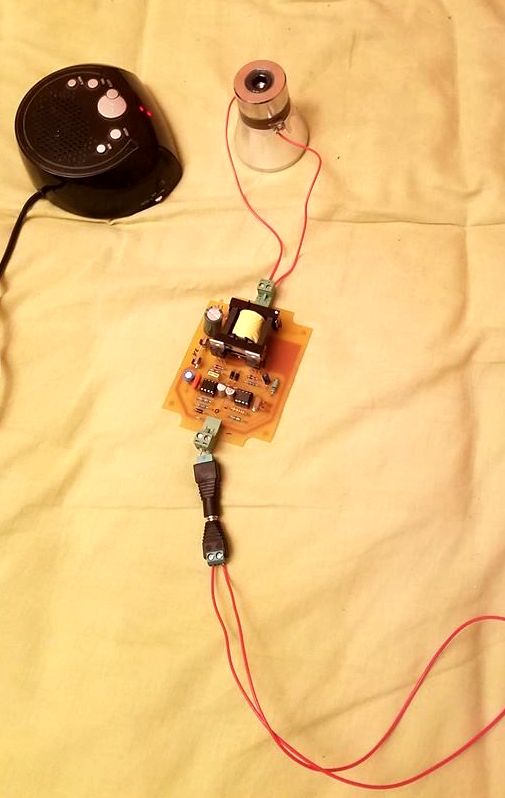
Pour vérifier le bon fonctionnement, comme indiqué sur EPE il est pratique d’avoir une radio AM (voir photo : on entend les « burst » qui perturbent la radio), j’insiste à nouveau sur le danger potentiel des hautes tensions du transducteur et ses câbles, non isolés à ce stade.
Installation à bord :

Contrairement aux recommandations de EPE, mais en accord avec les remarques de E. Bretscher sur le risque d’une mauvaise transmission des ultrasons en utilisant une colle « souple », j’ai opté pour coller le transducteur au plus près de la coque, avec une bonne colle epoxy bi-composant plus rigide, en isolant le transducteur de la coque par un disque de 0.2mm d’épaisseur en PEEK (plastique mécaniquement très résistant, de l’epoxy aurait pu convenir mais j’avais des chûtes disponibles). En fait, mécaniquement l’idéal serait, en plus du collage, de souder directement sur la coque la « vis à souder » fournie avec le transducteur (c’est le système utilisé sur les cuves de nettoyage à ultrasons), mais outre le fait que cela nécessite un outil spécial de soudure par point difficile à se procurer, ceci mettrai une des bornes du transducteur en contact électrique avec la coque. Ce ne serait en principe pas gênant puisque la sortie HT du transformateur est isolée de l’entrée 12V, mais cela me semble trop risqué sur un voilier aluminium particulièrement sensible à d’éventuels problèmes d’électrolyse en cas de fuite de courant, il est donc prudent de laisser « flottante » toute la partie HT.
J’ai collé directement le disque en PEEK sur le transducteur, noyé le transducteur et les connexions de ses fils d’alimentation dans un gobelet plastique rempli de silicone isolant (mais sans déborder sur la base avec le disque isolant qui sera collé sur la coque), puis j’ai collé l’ensemble sur l’aluminium de la coque, fraîchement mis à nu et nettoyé sur le diamètre du transducteur (pour permettre une bonne accroche). L’emplacement est sur une partie très plate de la coque (au milieu d’un bouchain), vers le dernier tiers selon la longueur (un peu sur le côté car au niveau du moteur). De plus le collage a été réalisé avec une colle à séchage rapide, en appuyant fortement pour garantir une bonne jonction la plus fine possible transducteur / disque isolant PEEK / coque. Bien entendu il faut veiller à ne pas introduire de bulles, et vérifier après séchage que la résistance entre le transducteur et la coque est > quelques 10kΩ. (idéalement avec un megohmètre permettant une mesure sous tension >500V). Ensuite l’ensemble est noyé dans un tube PVC rempli de silicone isolant, de façon à garantir une bonne étanchéité en cas de présence d’eau dans les fonds à cet endroit.
Le boîtier est dans un recoin en hauteur, protégé de l’humidité. Le câblage vers le transducteur est en coaxial haute-tension (mais d’autres câbles plus classiques conviendraient, pourvu qu’ils soient bien isolés et protégés de l’humidité et des chocs ou écrasements).
Pour vérifier le fonctionnement, en plus de l’astuce de la radio AM précédemment évoquée (je vois d’ailleurs aussi des signaux qui perturbent la clé SDR que j’utilise pour l’AIS et les méteofax !), une fois collé sur la coque j’entends suffisamment les petits bruits caractéristiques qui me rappellent que le système fonctionne (ce n’est pas gênant et je me suis habitué, toutefois pour les oreilles sensibles je recommande d’éviter de mettre le transducteur proche d’une couchette).
Résultats préléminaires :
Bien entendu, au moment du départ vers les Canaries en octobre 2018, j’ai quand même remis mon antifouling habituel (2 couches trilux33), puisque je ne m’attendais pas à ce que le système à ultrasons soit suffisant, mais plutôt qu’il renforce et prolonge l’effet de l’antifouling classique.
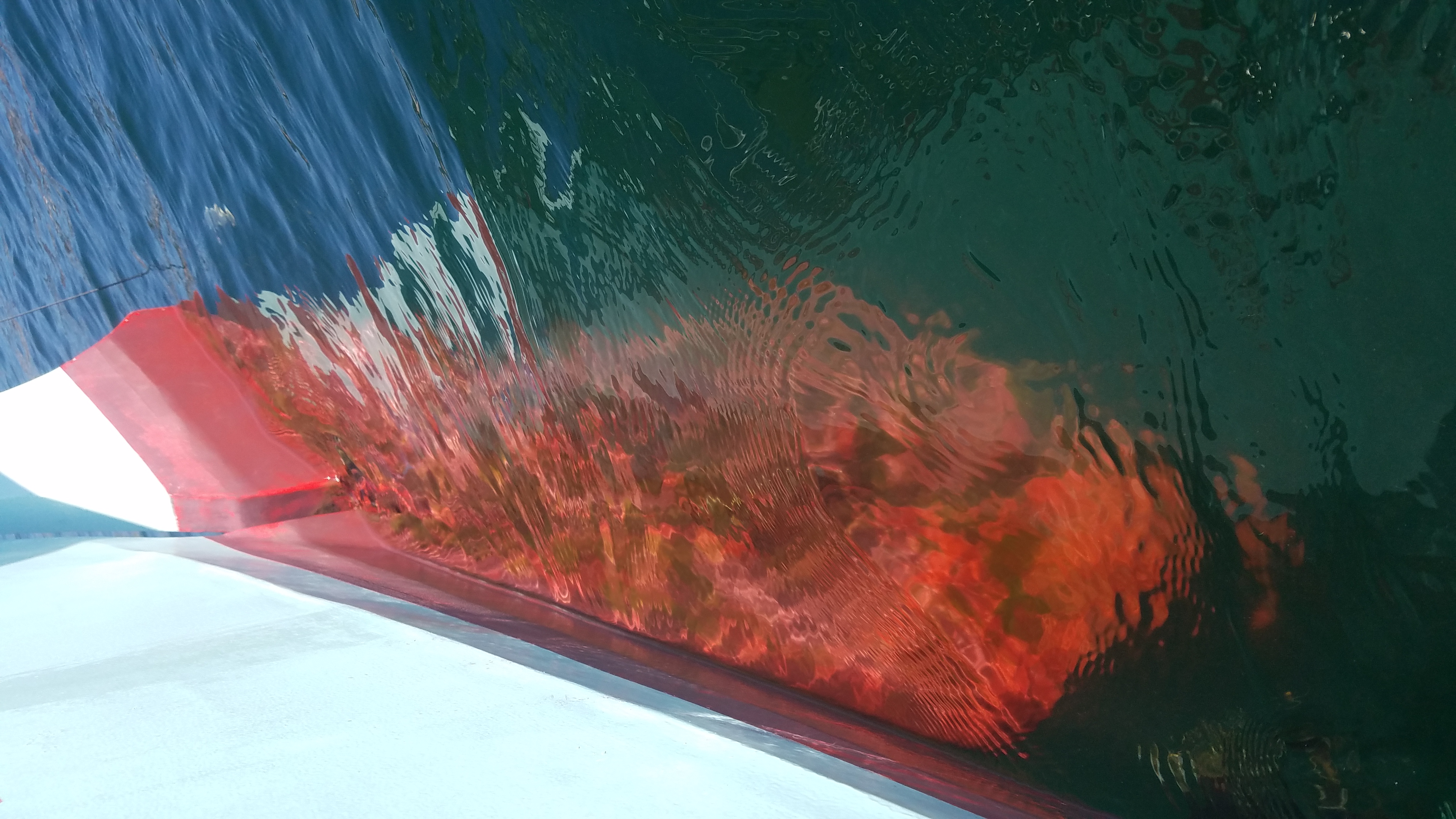
Bilan provisoire, après 6 mois de fonctionnement, dont 3 dans les eaux chaudes des Antilles : (malheureusement je ne pourrai pas mettre de photos avant la prochaine mise au sec).
Pour résumer, même si c’est ma première transat et que je n’ai pas de point de comparaison, je dirai que l’effet n’est pas miraculeux, mais pas non plus négligeable, en fait cela correspond tout à fait à ce que décrit E. Bretscher :

- Photo améliorée (Adobe Lightroom)

- Présence d’un léger film d’algues, mais moins abondant que sur d’autres voiliers similaires croisés, et qui s’enlève très facilement simplement en passant la main (ce qui me prend 5 min toutes les 2 ou 3 semaines)
- Pas de grosses concrétions, anatifes, ou autres coquillages difficiles à enlever. Les quelques anatifes, que j’ai uniquement vu lors de mon premier mouillage suite transat, se sont probablement installées pendant la transat, où j’ai eu quelques jours de calme à très petite vitesse, et pendant laquelle j’ai éteint mon système par peur de perturber les cétacés (en fait maintenant je ne pense pas que ça les gène car j’ai vu des dauphins s’approcher et passer plusieurs fois sous la coque alors que mon système était allumé).
- Une fois ces quelques anatifes enlevées, et mon système allumé presque en permanence depuis, je n’ai plus eu quoi que ce soit de bien accroché sous la flottaison, depuis 3 mois en zone tropicale. Seules quelques algues s’accrochent un peu au niveau de la ligne de flottaison.
Il est donc encore un peu tôt pour conclure, mais je trouve ces résultats très encourageant.
Par contre , comme E. Bretscher, je suis assez étonné que le transducteur semble être efficace sur presque toute la longueur de la coque : les disparités que j’observe sur le léger film d’algue sont manifestement dues à l’éclairage pas symétrique lors des derniers mouillages prolongés (les alizés imposant une orientation moyenne avec un côté plus ensoleillé), mais la zone autour du transducteur n’est pas particulièrement plus propre. C’est d’autant plus surprenant que en plongée j’entends très bien le son du transducteur vers l’arrière où il est placé, et le son s’affaiblit quand je m’en éloigne vers l’avant, où l’effet devrait donc être moins efficace. Je n’ai aucune explication à ce phénomène, je note cependant que certains évoquent l’hypothèse que les ultrasons n’agiraient pas directement sur le film biologique, mais faciliteraient la diffusion des molécules actives de la peinture antifouling vers la surface, je ne sais pas si cette hypothèse tient la route, mais peut être que cela permettrai d’expliquer que même des vibrations très faibles loin du transducteur aient quand même un effet.
Conclusion et perspectives :
En attendant d’avoir plus de recul, et le bilan d’une inspection détaillée lors de la prochaine mise à sec, qui sera l’occasion d’une 2ème partie de cet article avec éventuellement quelques améliorations (mais pas avant plusieurs mois), je dirai que même s’il n’empêche pas la formation d’un léger film d’algues, et ne peut donc permettre de se passer d’antifouling classique, ce système (en tout cas mon système tel qu’il est installé, avec un collage soigné sur une coque aluminium à bouchains), a au moins l’énorme avantage d’éviter la présence des anatifes et autres concrétions difficiles à enlever.
Je ne peux me permettre d’éteindre mon système avant la transat retour en juin, ce qui permettrai de valider définitivement son efficacité si les anatifes et algues plus tenaces revenaient en éteignant le système, mais en fin d’année sabbatique (octobre 2019), à l’occasion je ferai sûrement l’essai.
Il est probable que ce système puisse être beaucoup amélioré : outre l’ajout de 1 ou 2 transducteurs (la remarque de E. Bretscher sur les résonances entre plusieurs transducteurs me semble particulièrement pertinente), j’envisage ainsi de remplacer le balayage en fréquences actuellement gérée par le microprogramme PIC difficile à modifier, par mon raspberry, ce qui permettrai de modifier les fréquences plus facilement (malheureusement le langage python que j’utilise n’est pas assez rapide, il faut que je passe à un autre langage et ceci me demandera du temps). Avec un raspberry on peut même imaginer optimiser les fréquences automatiquement en utilisant 3 transducteurs : 2 en fonctionnement émetteur normal, pendant que le 3éme en fonctionnement récepteur sert de « micro » pour enregistrer les meilleures combinaisons de fréquences des 2 émetteurs, puis on permute les rôles de façon à optimiser à l’endroit du nouveau transducteur « micro ».
Bref n’hésitez pas à proposer en commentaires ou messages, des explications théoriques qui permettraient de mieux comprendre le fonctionnement de ce système, et surtout des améliorations pratiques, en particulier je serai enchanté si une personne pouvait m’aider à migrer vers une gestion par raspberry. Je n’ai aucune prétention sur ce système qui n’est qu’une réalisation essentiellement issue des instructions de la revue EPE, et cet article ne fait que rassembler des informations trouvées ailleurs. Donc je serai ravi d’être copié, et j’espère même dépassé par d’autres systèmes plus aboutis, pourvu qu’ils puissent être à leur tour librement copiés et partagés ![]()
PS : je précise que lors de mes prochaines étapes (Anguilla, BVI, Bermudes), je risque de ne pas pas avoir de bonnes connexions internet jusqu’aux Açores vers fin mai / début juin, je m’excuse par avance si je ne suis pas très réactif les prochaines semaines, mais je pense que j’aurai au moins quelques connexions par des hotspot wifi, mettons au moins une fois tous les 3 semaines.
Samdam avril 2019